
It’s Sunday night. There are just a couple more hours left before I go to sleep and my second week at ESA begins… In spite of it being nearly 10:00pm, the sun is still above the horizon shredding gold through the clouds here and there, and even making this killer rainbow chunk.
 Last Sunday, I arrived in Holland. It felt like I was tied to an unstoppable force being propelled through uncertainty towards a heap of even more unknowns… which was exciting or terrifying or equal parts both. Once I made it safely to the *penthouse* I’ve been taking roost in (its on the top floor of the tallest building around, at 3 stories. perfect nest), I began mentally preparing myself for what was to come.
Last Sunday, I arrived in Holland. It felt like I was tied to an unstoppable force being propelled through uncertainty towards a heap of even more unknowns… which was exciting or terrifying or equal parts both. Once I made it safely to the *penthouse* I’ve been taking roost in (its on the top floor of the tallest building around, at 3 stories. perfect nest), I began mentally preparing myself for what was to come.
During the four days of my first week at ESA, I’ve had a good share of wonderful conversations with people who have had many inspiring life experiences and knowledge in areas that until now, I’ve known very little about. I’ve been getting acquainted and have been compiling my environment. I can now walk down the hallways of the building I call home-base and wave to most of the people now because there is some level of familiarity.
I feel kind-of like Annie arriving at Daddy Warbuck’s mansion. I’ve sat with a different crowd every day for lunch, had tea and coffee with those who were willing to share a few moments with me, and wandered around with aw-filled doe eyes while absorbing the initial pleasure shock of being in a new environment that has until now been merely an abstraction in my imagination.

Defining the Meaning in my Absurdity
Equally important as what I hear from the brilliant minds available to me, is what I end up saying to them about myself. With every conversation I start with each new person I meet, I’m in a position where I need to verbally illustrate what it is that I do and why. I actually get to hear myself explain Noodle, who he is and what his existence is all about. In the moment, my brain has to chisel out the words and commit to them.
The elevator pitch is a difficult thing to hone. Not only is the concept broad, much of the meaning beneath my work is an abstract “where my head is” sort of thing that’s the result of my life experiences leading up to now (and where I am in the moment). I can feel what my work means to me, but I’m not often needing to describe where the river started, or where I presume it’s going.
Since I obviously haven’t been working on prototypes, or CAD, or anything physical like I typically do, I’ve allowed myself to really think about all that philosophy hoo-ha that everyone hates artists for getting so “overly” gushy about (bats eyes).
It’s important to draw inward and exhale… and I’ve come to realize that’s what this journey is about. Instead of tirelessly pushing my face into the design- I must listen to others, observe the interaction and then meditate on the sparks that few off in the process.
Anyhow… I’m enjoying every minute of it ❤ I finished off my week by taking Noodle to the beach near our nest for his first big sand. He got to pretend he’s a strand beast =D
 After admitting that my creations didn’t actually do what I enjoyed bragging about, there was some talk about how I could simulate the act of ‘tasting’ more effectively. Almost immediately, the idea of using litmus paper came up, and I think it has sat on the immediate back burner of my mind ever since.
After admitting that my creations didn’t actually do what I enjoyed bragging about, there was some talk about how I could simulate the act of ‘tasting’ more effectively. Almost immediately, the idea of using litmus paper came up, and I think it has sat on the immediate back burner of my mind ever since. This past week… I finally made what I can comfortably call, Noodle’s first tasting foot appendage… *cheers*
This past week… I finally made what I can comfortably call, Noodle’s first tasting foot appendage… *cheers* HOW IT WORKS
HOW IT WORKS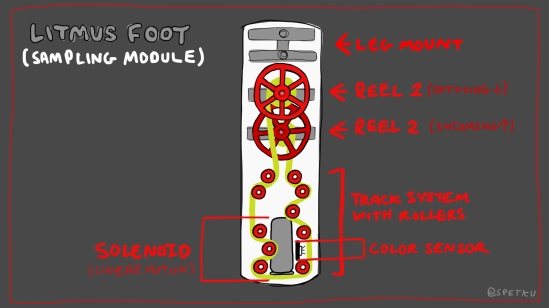 (See video @ top for a more detailed explanation)
(See video @ top for a more detailed explanation) To make my point… Last month I got a bag of Jelly Beans to use while developing my bean planting module. I measured the dimensions of a small handful as references for the thing I was designing, but the rest of course, got eaten.
To make my point… Last month I got a bag of Jelly Beans to use while developing my bean planting module. I measured the dimensions of a small handful as references for the thing I was designing, but the rest of course, got eaten.
 In order to attach that density of toe tendons to the toe-ring, I had to eliminate the use of hardware (which was kind of a relief). As improvisation, I threaded some 3mm rubber hose through the loops of the toe tendons to hold everything in place.
In order to attach that density of toe tendons to the toe-ring, I had to eliminate the use of hardware (which was kind of a relief). As improvisation, I threaded some 3mm rubber hose through the loops of the toe tendons to hold everything in place. With one complete proof-of-concept to show, I set everything down and allowed myself to become very distracted with a whole slew of things (which is good). My life exploded momentarily and when everything settled back down about a month ago, I found myself looking at an opportunity to travel to Linz, Austria to exhibit something of mine at the ARS Electronica festival [!]
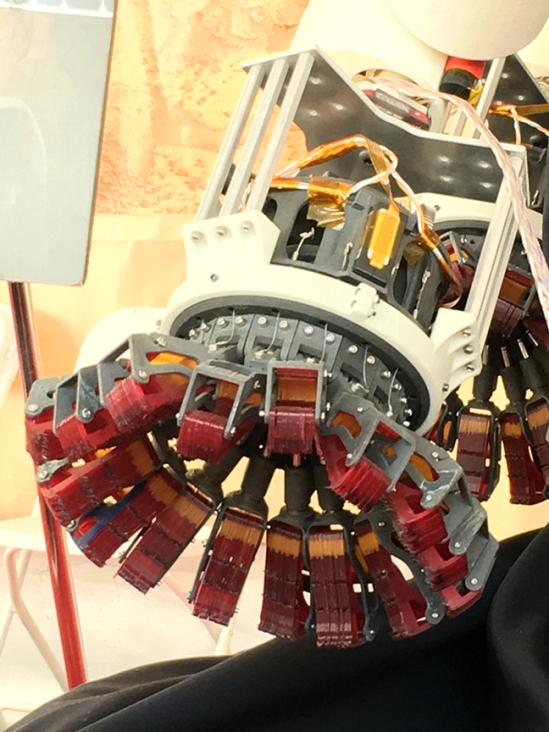
With one complete proof-of-concept to show, I set everything down and allowed myself to become very distracted with a whole slew of things (which is good). My life exploded momentarily and when everything settled back down about a month ago, I found myself looking at an opportunity to travel to Linz, Austria to exhibit something of mine at the ARS Electronica festival [!] I’m grateful I had Mark and Tony to help wherever I needed aide picking up the slack. One glass of wine at a time, and one task after another, the new feet took shape and were installed on Noodle (mere hours before I would need to disassemble him completely for his long flight over to Linz in my suitcase).
I’m grateful I had Mark and Tony to help wherever I needed aide picking up the slack. One glass of wine at a time, and one task after another, the new feet took shape and were installed on Noodle (mere hours before I would need to disassemble him completely for his long flight over to Linz in my suitcase).
 During this gauntlet he held his own, but Noodle did blow out a servo motor. Just as I was returning to my exhibit area to check in on Mark (who would periodically drop by to watch over the young one while I was away), I saw a nice white plume of smoke streaming forth from Noodle’s foot. Apparently they can’t quite handle hours of continuous use- so the toes are just that chafey.
During this gauntlet he held his own, but Noodle did blow out a servo motor. Just as I was returning to my exhibit area to check in on Mark (who would periodically drop by to watch over the young one while I was away), I saw a nice white plume of smoke streaming forth from Noodle’s foot. Apparently they can’t quite handle hours of continuous use- so the toes are just that chafey.




















